Fronius RI MOD Compact Com-modul

Specifikationer
- Produktnavn: RI FB PRO/i RI MOD/i CC Ethernet/IP-2P
- Sælger: Fronius International GmbH
- Enhedstype: Kommunikationsadapter
- Produktkode: 0320hex (800dez)
- Billedtype: Standard billede
- Forekomsttype: Producerende instans
- Forbrugende instans: Forbrugende instans
- Forekomstnavn: Fronius-FB-Pro-EtherNetIP(TM)
Produktbrugsvejledning
Indstilling af busmodulets IP-adresse
Busmodulets IP-adresse kan indstilles med DIP-switcherne på interfacet:
- Indstil IP-adressen inden for området 192.168.0.xx (hvor xx svarer til DIP-switchpositioner fra 1 til 63).
- DIP-switchindstillinger og tilsvarende IP-adresser:
| DIP-switch | IP-adresse |
|---|---|
| FRA FRA FRA FRA FRA FRA TIL | 1 |
| FRA FRA FRA FRA FRA TIL FRA | 2 |
| FRA FRA FRA FRA FRA TIL TIL | 3 |
| TIL TIL TIL TIL TIL TIL FRA | 62 |
| ON ON ON ON ON ON | 63 |
Datatyper og signalkortlægning
Produktet bruger følgende datatyper:
- UINT16 (usigneret heltal) – Interval: 0 til 65535
- SINT16 (signeret heltal) – interval: -32768 til 32767
Adressekortlægning for input- og outputsignaler:
| Adresse | Type | Beskrivelse |
|---|---|---|
| 0-7 | BIT-signal | Detaljer om signalkortlægning |
Generel
Sikkerhed
ADVARSEL!
Fare ved forkert betjening og arbejde, der ikke udføres korrekt. Dette kan resultere i alvorlig personskade og materiel skade.
- Alt arbejde og funktioner beskrevet i dette dokument må kun udføres af teknisk uddannet og kvalificeret personale.
- Læs og forstå hele dette dokument.
- Læs og forstå alle sikkerhedsregler og brugerdokumentation for dette udstyr og alle systemkomponenter.
Forbindelser og skærme
| 1 | TX+ |
| 2 | TX |
| 3 | RX+ |
| 6 | RX |
| 4,5,7, | Bruges ikke normalt; at sikre- |
| 8 | re signalere fuldstændighed, den |
| stifterne skal være interkon- | |
| nected og, efter bestået | |
| gennem et filterkredsløb, skal | |
| afsluttes ved jorden | |
| leder (PE). |
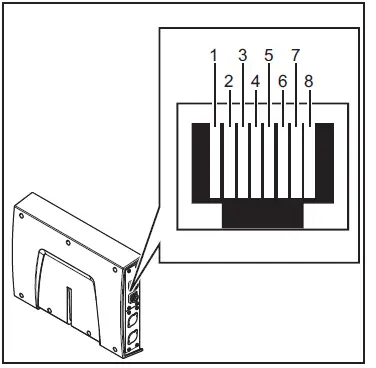
RJ45 forbindelse
| (1) LED MS – Modulstatus |
| Slukket:
Ingen forsyning voltage |
| Lyser grønt:
Styret af en mester |
| Blinker grønt (én gang):
Master ikke konfigureret eller master inaktiv |
| Lyser rødt:
Større fejl (undtagelsestilstand, alvorlig fejl, …) |
| Blinker rødt:
Rettes fejl |
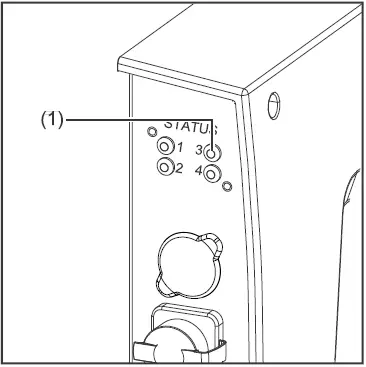
| (2) LED NS – Netværksstatus |
| Slukket:
Ingen forsyning voltage eller ingen IP-adresse |
| Lyser grønt:
Online, en eller flere forbindelser etableret (CIP kategori 1 eller 3) |
| Blinker grønt:
Online, ingen forbindelse er etableret |
| Lyser rødt:
Dobbelt IP-adresse, alvorlig fejl |
| Blinker rødt:
Overløb af tid for en eller flere forbindelser (CIP kategori 1 eller 3) |
Dataoverførselsegenskaber
Overførselsteknologi
- Ethernet
Medium
- Ved valg af kabler og stik skal ODVA-anbefalingen for planlægning og installation af EtherNet/IP-systemer overholdes. EMC-testene blev udført af producenten med kablet IE-C5ES8VG0030M40M40-F.
Transmissionshastighed
- 10 Mbit/s eller 100 Mbit/s
Busforbindelse
- RJ-45 Ethernet / M12
Konfigurationsparametre
- I nogle robotstyringssystemer kan det være nødvendigt at angive de her beskrevne konfigurationsparametre, så busmodulet kan kommunikere med robotten.
| Parameter | Værdi | Beskrivelse |
| leverandør-id | 0534hex (1332dec) | Fronius International GmbH |
| Enhedstype | 000Chex (12dec) | Kommunikationsadapter |
| Produktkode | 0320hex (800dec) | Fronius FB Pro Ethernet/IP-2-port |
Produktnavn Fronius-FB-Pro-EtherNetIP(TM)
|
Billedtype |
Forekomst Type |
Forekomstnavn |
Forekomst Beskrivelse |
Forekomstnummer |
Størrelse [Byt e] |
| Standard billede | Producerende Forekomst | Standard for inputdata | Data fra strømkilde til robot | 100 | 40 |
|
Billedtype |
Forekomst Type |
Forekomstnavn |
Forekomst Beskrivelse |
Forekomstnummer |
Størrelse [Byt e] |
| Forbrugende Forekomst | Output Data Standard | Data fra robot til strømkilde | 150 | 40 | |
| Økonomi billede | Producerende Forekomst | Standard for inputdata | Data fra strømkilde til robot | 101 | 16 |
| Forbrugende Forekomst | Output Data Standard | Data fra robot til strømkilde | 151 | 16 |
Indstilling af busmodulets IP-adresse
Indstilling af busmodulets IP-adresse Du kan indstille busmodulets IP-adresse som følger:
- Brug af DIP-switchen i interfacet inden for området defineret af 192.168.0.xx (xx = DIP-switchindstilling = 1 til 63)
- Alle positioner er indstillet til OFF-positionen fra fabrikken. I dette tilfælde skal IP-adressen indstilles på webstedet for svejsemaskinen
- På webstedet for svejsemaskinen (hvis alle DIP-switchens positioner er sat til OFF-positionen)
IP-adressen indstilles ved hjælp af DIP-switch-positionerne 1 til 6. Konfigurationen udføres i binært format. Dette resulterer i et konfigurationsområde på 1 til 63 i decimalformat.
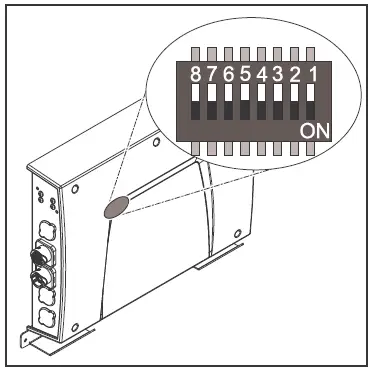
| Example for indstilling de IP adresse af busmodulet ved hjælp af DIP-switchen ind grænsefladen: | ||||||||
| Dypkontakt | ||||||||
| 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | IP-adresse |
| – | – | SLUKKET | SLUKKET | SLUKKET | SLUKKET | SLUKKET | ON | 1 |
| – | – | SLUKKET | SLUKKET | SLUKKET | SLUKKET | ON | SLUKKET | 2 |
| – | – | SLUKKET | SLUKKET | SLUKKET | SLUKKET | ON | ON | 3 |
| – | – | ON | ON | ON | ON | ON | SLUKKET | 62 |
| – | – | ON | ON | ON | ON | ON | ON | 63 |
Instruktioner til indstilling af IP-adressen på webstedet for svejsemaskinen:
Noter IP-adressen på den anvendte svejsemaskine:
- På svejsemaskinens kontrolpanel skal du vælge "Defaults"
- På svejsemaskinens kontrolpanel skal du vælge "System"
- På svejsemaskinens kontrolpanel skal du vælge "Information"
- Noter den viste IP-adresse (f.eksample: 10.5.72.13)
Få adgang til websvejsemaskinens sted i internetbrowseren:
- Tilslut computeren til svejsemaskinens netværk
- Indtast svejsemaskinens IP-adresse i søgefeltet i internetbrowseren og bekræft
- Indtast standardbrugernavnet (admin) og adgangskoden (admin)
- De webstedet for strømkilden vises
Indstil busmodulets IP-adresse:
- På kraftsvejsemaskinen skal du vælge fanen "RI FB PRO/i".
- Indtast den ønskede IP-adresse til grænsefladen under "Modulkonfiguration". F.eksampaf: 192.168.0.12
- Vælg "Indstil konfiguration"
- Vælg "Genstart modul"
- Den indstillede IP-adresse anvendes
Ind- og udgangssignaler
Datatyper
Følgende datatyper bruges:
- UINT16 (usigneret heltal)
- Det hele tal i intervallet fra 0 til 65535
- SINT16 (signeret heltal)
- Det hele tal går fra -32768 til 32767
Konvertering examples:
- for en positiv værdi (SINT16) f.eks. ønsket trådhastighed x faktor 12.3 m/min x 100 = 1230dec = 04CEhex
- for en negativ værdi (SINT16) f.eks. buekorrektion x faktor -6.4 x 10 = -64dec = FFC0hex
Tilgængelighed af indgangssignaler
Indgangssignalerne nedenfor er tilgængelige fra firmware V2.0.0 på RI FB PRO/i og fremefter.
Indgangssignaler (fra robot til strømkilde)
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor | Procesbillede | ||||
|
Pårørende |
Absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
0 |
0 |
0 | 0 | Svejsestart | Stigende |
ü |
ü |
||
| 1 | 1 | Robot klar | Høj | ||||||
| 2 | 2 | Arbejdstilstand Bit 0 | Høj |
Se tabel Værdi Rækkevidde for Arbejder Mode på side 35 |
|||||
| 3 | 3 | Arbejdstilstand Bit 1 | Høj | ||||||
| 4 | 4 | Arbejdstilstand Bit 2 | Høj | ||||||
| 5 | 5 | Arbejdstilstand Bit 3 | Høj | ||||||
| 6 | 6 | Arbejdstilstand Bit 4 | Høj | ||||||
| 7 | 7 | — | |||||||
|
1 |
0 | 8 | Gas på | Stigende | |||||
| 1 | 9 | Ledning fremad | Stigende | ||||||
| 2 | 10 | Ledning bagud | Stigende | ||||||
| 3 | 11 | Fejl ved afslutning | Stigende | ||||||
| 4 | 12 | Berøringssansning | Høj | ||||||
| 5 | 13 | Fakkel blæse ud | Stigende | ||||||
| 6 | 14 | Behandler valg Bit 0 | Høj | Se tabel Værdi række proces li- ne udvalgn på side 36 | |||||
|
7 |
15 |
Behandler valg Bit 1 |
Høj |
||||||
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor | Procesbillede | ||||
|
Pårørende |
Absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
1 |
2 |
0 | 16 | Svejsesimulering | Høj |
ü |
ü |
||
|
1 |
17 |
Svejseproces MIG/MAG: 1)
Synkron puls tændt |
Høj |
||||||
| Svejseproces WIG: 2)
TAC på |
Høj |
||||||||
|
2 |
18 |
Svejseproces WIG: 2)
Kasketformning |
Høj |
||||||
| 3 | 19 | — | |||||||
| 4 | 20 | — | |||||||
| 5 | 21 | Booster manual | Høj | ||||||
| 6 | 22 | Wirebremse på | Høj | ||||||
| 7 | 23 | Torchbody Xchange | Høj | ||||||
|
3 |
0 | 24 | — | ||||||
| 1 | 25 | Undervisningstilstand | Høj | ||||||
| 2 | 26 | — | |||||||
| 3 | 27 | — | |||||||
| 4 | 28 | — | |||||||
| 5 | 29 | Ledning siden start | Stigende | ||||||
| 6 | 30 | Wire sense break | Stigende | ||||||
| 7 | 31 | — | |||||||
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor | Procesbillede | ||||
|
Pårørende |
Absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
2 |
4 |
0 | 32 | TWIN-tilstand Bit 0 | Høj | Se tabel Værdi Rækkevidde til TWIN Mode på side 36 |
ü |
ü |
|
|
1 |
33 |
TWIN-tilstand Bit 1 |
Høj |
||||||
| 2 | 34 | — | |||||||
| 3 | 35 | — | |||||||
| 4 | 36 | — | |||||||
|
5 |
37 |
Dokumentationstilstand |
Høj |
Se tabel Værdi Rækkevidde for Doku- mentationstilstand på side 36 | |||||
| 6 | 38 | — | |||||||
| 7 | 39 | — | |||||||
|
5 |
0 | 40 | — | ||||||
| 1 | 41 | — | |||||||
| 2 | 42 | — | |||||||
| 3 | 43 | — | |||||||
| 4 | 44 | — | |||||||
| 5 | 45 | — | |||||||
| 6 | 46 | — | |||||||
| 7 | 47 | Deaktiver processtyret korrektion | Høj | ||||||
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor | Procesbillede | ||||
|
Pårørende |
Absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
3 |
6 |
0 | 48 | — |
ü |
ü |
|||
| 1 | 49 | — | |||||||
| 2 | 50 | — | |||||||
| 3 | 51 | — | |||||||
| 4 | 52 | — | |||||||
| 5 | 53 | — | |||||||
| 6 | 54 | — | |||||||
| 7 | 55 | — | |||||||
|
7 |
0 | 56 | ExtInput1 => OPT_Output 1 | Høj | |||||
| 1 | 57 | ExtInput2 => OPT_Output 2 | Høj | ||||||
| 2 | 58 | ExtInput3 => OPT_Output 3 | Høj | ||||||
| 3 | 59 | ExtInput4 => OPT_Output 4 | Høj | ||||||
| 4 | 60 | ExtInput5 => OPT_Output 5 | Høj | ||||||
| 5 | 61 | ExtInput6 => OPT_Output 6 | Høj | ||||||
| 6 | 62 | ExtInput7 => OPT_Output 7 | Høj | ||||||
| 7 | 63 | ExtInput8 => OPT_Output 8 | Høj | ||||||
| 4 | 8-
9 |
0-7 | 64-79 | Svejsekarakteristik- / Jobnummer | UINT16 | 0 til 1000 | 1 | ü | ü |
|
5 |
10 – 11 |
0-7 |
80-95 |
Svejseproces MIG/MAG: 1)
Konstant ledning:
Kommandoværdi for trådfremføringshastighed |
SINT16 |
-327,68 til 327,67 [m / min] |
100 |
ü |
ü |
| Svejseproces WIG: 2)
Hoved- / Hotwire strømkommandoværdi |
UINT16 |
0 til 6553,5 [A] |
10 |
||||||
| For job-tilstand:
Strømkorrektion |
SINT16 |
-20,00 til
20,00 [%] |
100
|
||||||
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor | Procesbillede | ||||
|
Pårørende |
Absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
6 |
12 – 13 |
0-7 |
96-111 |
Svejseproces MIG/MAG: 1)
Buelængde korrektion |
SINT16 |
-10,0 til
10,0 [Schritte] |
10 |
ü |
ü |
| Svejseproces
MIG/MAG Standard-Manuel:
Svejsning voltage |
UINT16 |
0,0 til
6553,5 [V] |
10 |
||||||
| Svejseproces WIG: 2)
Kommandoværdi for trådfremføringshastighed |
SINT16 |
-327,68 til 327,67 [m / min] |
100 |
||||||
| For job-tilstand:
Buelængde korrektion |
SINT16 |
-10,0 til
10,0 [Schritte] |
10 |
||||||
| Konstant svejseproces:
Hotwire strøm |
UINT16 |
0,0 til
6553,5 [A] |
10 |
||||||
|
7 |
14 – 15 |
0-7 |
112-127 |
Svejseproces MIG/MAG: 1)
Puls-/dynamisk korrektion |
SINT16 |
-10,0 til
10,0 [trin] |
10 |
ü |
ü |
| Svejseproces
MIG/MAG Standard-Manuel:
Dynamisk |
UINT16 |
0,0 til
10,0 [trin] |
10 |
||||||
| Svejseproces WIG: 2)
Trådkorrektion |
SINT16 |
-10,0 til
10,0 [trin] |
10 |
||||||
|
8 |
16 – 17 |
0-7 |
128-143 |
Svejseproces MIG/MAG: 1)
Korrektion af trådtilbagetrækning |
UINT16 |
0,0 til
10,0 [trin] |
10 |
ü |
|
| Svejseproces WIG: 2)
Tråd tilbagetrukket ende |
UINT16 |
FRA, 1 til
50 [Mm] |
1 |
||||||
|
9 |
18
– 19 |
0-7 |
144-159 |
Svejsehastighed |
UINT16 |
0,0 til
1000,0 [cm/min] |
10 |
ü |
|
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor | Procesbillede | ||||
|
Pårørende |
Absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
10 |
20 – 21 |
0-7 |
160-175 |
Processtyret korrektion |
Se tabel Værdi rækkevidde for Behandle kontrolleret rettelse på side 36 |
ü |
|||
|
11 |
22
– 23 |
0-7 |
176-191 |
Svejseproces WIG: 2)
Start af trådpositionering |
ü |
||||
|
12 |
24
– 25 |
0-7 |
192-207 |
— |
ü |
||||
|
13 |
26
– 27 |
0-7 |
208-223 |
— |
ü |
||||
|
14 |
28
– 29 |
0-7 |
224-239 |
— |
ü |
||||
|
15 |
30
– 31 |
0-7 |
240-255 |
Ledningslængde frem/tilbage |
UINT16 |
FRA / 1 til 65535 [mm] |
1 |
ü |
|
|
16 |
32
– 33 |
0-7 |
256-271 |
Trådføler kantdetektion |
UINT16 |
FRA / 0,5
til 20,0 [mm] |
10 |
ü |
|
|
17 |
34
– 35 |
0-7 |
272-287 |
— |
ü |
||||
|
18 |
36
– 37 |
0-7 |
288-303 |
— |
ü |
||||
|
19 |
38
– 39 |
0-7 |
304-319 |
Søm nummer |
UINT16 |
0 til
65535 |
1 |
ü |
|
- MIG/MAG Puls-Synergic, MIG/MAG Standard-Synergic, MIG/MAG Standard-Manuel, MIG/MAG PMC, MIG/MAG, LSC
- WIG koldtråd, WIG hotwire
Værdiområde for arbejdstilstand
| Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Beskrivelse |
| 0 | 0 | 0 | 0 | 0 | Internt parametervalg |
| 0 | 0 | 0 | 0 | 1 | Særlige 2-trins tilstandsegenskaber |
| 0 | 0 | 0 | 1 | 0 | Jobtilstand |
| Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Beskrivelse |
| 0 | 1 | 0 | 0 | 0 | 2-trins tilstandsegenskaber |
| 0 | 1 | 0 | 0 | 1 | 2-trins MIG/MAG standard manual |
| 1 | 0 | 0 | 0 | 0 | Inaktiv tilstand |
| 1 | 0 | 0 | 0 | 1 | Stop kølevæskepumpen |
| 1 | 1 | 0 | 0 | 1 | R/L-måling |
Værdiområde for driftstilstand
Værdiinterval for dokumentationstilstand
| Bit 0 | Beskrivelse |
| 0 | Sømnummer på svejsemaskine (intern) |
| 1 | Søm antal robotter (Word 19) |
Værdiområdet for dokumentationstilstand
Værdiområdet for processtyret korrektion
|
Behandle |
Signal |
Aktivitet/datatype |
Konfiguration af værdiområde rækkevidde |
Enhed |
Faktor |
|
PMC |
Buelængde stabilisator |
SINT16 |
-327.8 til +327.7
0.0 til +5.0 |
Volt |
10 |
Værdiområdet for dokumentationstilstand
Værdiområdet for processtyret korrektion
|
Behandle |
Signal |
Aktivitet/datatype |
Konfiguration af værdiområde rækkevidde |
Enhed |
Faktor |
|
PMC |
Buelængde stabilisator |
SINT16 |
-327.8 til +327.7
0.0 til +5.0 |
Volt |
10 |
Værdiområdet for procesafhængig korrektion
Værdiområde Proceslinjevalg
| Bit 1 | Bit 0 | Beskrivelse |
| 0 | 0 | Proceslinje 1 (standard) |
| 0 | 1 | Proceslinje 2 |
| 1 | 0 | Proceslinje 3 |
| 1 | 1 | Reserveret |
Værdiområde for valg af proceslinje
Værdiområde for TWIN-tilstand
| Bit 1 | Bit 0 | Beskrivelse |
| 0 | 0 | TWIN Single mode |
| 0 | 1 | TWIN-afledningstilstand |
| 1 | 0 | TWIN Trail-tilstand |
| 1 | 1 | Reserveret |
Værdiområdet for TWIN-tilstand
Tilgængelighed af udgangssignaler
Udgangssignalerne nedenfor er tilgængelige fra firmware V2.0.0 på RI FB PRO/i og fremefter.
Udgangssignaler (fra strømkilde til robot)
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor |
Procesbillede | ||||
| pårørende | absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
0 |
0 |
0 | 0 | Heartbeat Powersource | Høj/Lav | 1 Hz |
ü |
ü |
|
| 1 | 1 | Strømkilde klar | Høj | ||||||
| 2 | 2 | Advarsel | Høj | ||||||
| 3 | 3 | Proces aktiv | Høj | ||||||
| 4 | 4 | Nuværende flow | Høj | ||||||
| 5 | 5 | Bue stabilt-/berøringssignal | Høj | ||||||
| 6 | 6 | Hovedstrømsignal | Høj | ||||||
| 7 | 7 | Berøringssignal | Høj | ||||||
|
1 |
0 |
8 |
Kollisionsboks aktiv |
Høj |
0 = kollision eller kabelbrud | ||||
| 1 | 9 | Robot Motion Release | Høj | ||||||
| 2 | 10 | Trådstift arbejdsemne | Høj | ||||||
| 3 | 11 | — | |||||||
| 4 | 12 | Kortslutningskontaktspids | Høj | ||||||
| 5 | 13 | Parametervalg evigt | Høj | ||||||
| 6 | 14 | Karakteristisk tal gyldigt | Høj | ||||||
| 7 | 15 | Fakkelkroppen grebet | Høj | ||||||
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor |
Procesbillede | ||||
| pårørende | absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
1 |
2 |
0 | 16 | Kommandoværdi uden for rækkevidde | Høj |
ü |
ü |
||
| 1 | 17 | Korrektion uden for rækkevidde | Høj | ||||||
| 2 | 18 | — | |||||||
| 3 | 19 | Grænsesignal | Høj | ||||||
| 4 | 20 | — | |||||||
| 5 | 21 | — | |||||||
| 6 | 22 | Hovedforsyningsstatus | Lav | ||||||
| 7 | 23 | — | |||||||
|
3 |
0 | 24 | Sensorstatus 1 | Høj |
Se tabel Tildel- ment af Sensor sta- bruger 1-4 på side 40 |
||||
| 1 | 25 | Sensorstatus 2 | Høj | ||||||
| 2 | 26 | Sensorstatus 3 | Høj | ||||||
| 3 | 27 | Sensorstatus 4 | Høj | ||||||
| 4 | 28 | — | |||||||
| 5 | 29 | — | |||||||
| 6 | 30 | — | |||||||
| 7 | 31 | — | |||||||
|
2 |
4 |
0 | 32 | — |
ü |
ü |
|||
| 1 | 33 | — | |||||||
| 2 | 34 | — | |||||||
| 3 | 35 | Sikkerhedsstatus Bit 0 | Høj | Se tabel Værdi løb- ge Sikkerhedsstatus på side 41 | |||||
| 4 | 36 | Sikkerhedsstatus Bit 1 | Høj | ||||||
| 5 | 37 | — | |||||||
| 6 | 38 | Notifikation | Høj | ||||||
| 7 | 39 | Systemet er ikke klar | Høj | ||||||
|
5 |
0 | 40 | — | ||||||
| 1 | 41 | — | |||||||
| 2 | 42 | — | |||||||
| 3 | 43 | — | |||||||
| 4 | 44 | — | |||||||
| 5 | 45 | — | |||||||
| 6 | 46 | — | |||||||
| 7 | 47 | — | |||||||
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor |
Procesbillede | ||||
| pårørende | absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
3 |
6 |
0 | 48 | Procesbit 0 | Høj |
Se tabel Værdi Rækkevidde for Behandle Bit på side 41 |
ü |
ü |
|
| 1 | 49 | Procesbit 1 | Høj | ||||||
| 2 | 50 | Procesbit 2 | Høj | ||||||
| 3 | 51 | Procesbit 3 | Høj | ||||||
| 4 | 52 | Procesbit 4 | Høj | ||||||
| 5 | 53 | — | |||||||
| 6 | 54 | Berøringssignal gasdyse | Høj | ||||||
| 7 | 55 | TWIN-synkronisering aktiv | Høj | ||||||
|
7 |
0 | 56 | ExtOutput1 <= OPT_Input1 | Høj | |||||
| 1 | 57 | ExtOutput2 <= OPT_Input2 | Høj | ||||||
| 2 | 58 | ExtOutput3 <= OPT_Input3 | Høj | ||||||
| 3 | 59 | ExtOutput4 <= OPT_Input4 | Høj | ||||||
| 4 | 60 | ExtOutput5 <= OPT_Input5 | Høj | ||||||
| 5 | 61 | ExtOutput6 <= OPT_Input6 | Høj | ||||||
| 6 | 62 | ExtOutput7 <= OPT_Input7 | Høj | ||||||
| 7 | 63 | ExtOutput8 <= OPT_Input8 | Høj | ||||||
| 4 | 8-
9 |
0-7 | 64-79 | Svejsning voltage | UINT16 | 0.0 til
655.35 [V] |
100 | ü | ü |
|
5 |
10
– 11 |
0-7 |
80-95 |
Svejsestrøm |
UINT16 |
0.0 til 6553.5 [A] |
10 |
ü |
ü |
|
6 |
12
– 13 |
0-7 |
96-111 |
Trådfremføringshastighed |
SINT16 |
-327.68 til
327.67 [m/min] |
100 |
ü |
ü |
|
7 |
14
– 15 |
0-7 |
112-127 |
Faktisk reel værdi for sømsporing |
UINT16 |
0 til
6.5535 |
10000 |
ü |
ü |
|
8 |
16
– 17 |
0-7 |
128-143 |
Fejlnummer |
UINT16 |
0 til
65535 |
1 |
ü |
|
|
9 |
18
– 19 |
0-7 |
144-159 |
Advarselsnummer |
UINT16 |
0 til
65535 |
1 |
ü |
|
|
Adresse |
Signal |
Aktivitet/datatype |
Rækkevidde |
Faktor |
Procesbillede | ||||
| pårørende | absolut | Standard | Økonomi | ||||||
| ORD | BYTE | BIT |
BIT |
||||||
|
10 |
20
– 21 |
0-7 |
160-175 |
Motorstrøm M1 |
SINT16 |
-327.68 til
327.67 [A] |
100 |
ü |
|
|
11 |
22
– 23 |
0-7 |
176-191 |
Motorstrøm M2 |
SINT16 |
-327.68 til
327.67 [A] |
100 |
ü |
|
|
12 |
24
– 25 |
0-7 |
192-207 |
Motorstrøm M3 |
SINT16 |
-327.68 til
327.67 [A] |
100 |
ü |
|
|
13 |
26
– 27 |
0-7 |
208-223 |
— |
ü |
||||
|
14 |
28
– 29 |
0-7 |
224-239 |
— |
ü |
||||
|
15 |
30
– 31 |
0-7 |
240-255 |
— |
ü |
||||
|
16 |
32
– 33 |
0-7 |
256-271 |
Ledningsposition |
SINT16 |
-327.68 til
327.67 [Mm] |
100 |
ü |
|
|
17 |
34
– 35 |
0-7 |
272-287 |
— |
ü |
||||
|
18 |
36
– 37 |
0-7 |
288-303 |
— |
ü |
||||
|
19 |
38
– 39 |
0-7 |
304-319 |
— |
ü |
||||
Tildeling af sensorstatusser 1–4
| Signal | Beskrivelse |
| Sensorstatus 1 | OPT/i WF R ledningsende (4,100,869) |
| Sensorstatus 2 | OPT/i WF R trådtromle (4,100,879) |
| Sensorstatus 3 | OPT/i WF R ringsensor (4,100,878) |
| Sensorstatus 4 | Trådbuffersæt CMT TPS/I (4,001,763) |
Tildeling af sensorstatusser
Værdiområde Sikkerhedsstatus
| Bit 1 | Bit 0 | Beskrivelse |
| 0 | 0 | Reservere |
| 0 | 1 | Holde |
| 1 | 0 | Stop |
| 1 | 1 | Ikke installeret / aktiv |
Værdiinterval for procesbit
| Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Beskrivelse |
| 0 | 0 | 0 | 0 | 0 | Ingen intern parametervalg eller proces |
| 0 | 0 | 0 | 0 | 1 | MIG/MAG puls synergisk |
| 0 | 0 | 0 | 1 | 0 | MIG/MAG standard synergisk |
| 0 | 0 | 0 | 1 | 1 | MIG/MAG PMC |
| 0 | 0 | 1 | 0 | 0 | MIG/MAG LSC |
| 0 | 0 | 1 | 0 | 1 | MIG/MAG standard manual |
| 0 | 0 | 1 | 1 | 0 | Elektrode |
| 0 | 0 | 1 | 1 | 1 | TIG |
| 0 | 1 | 0 | 0 | 0 | CMT |
| 0 | 1 | 0 | 0 | 1 | Konstantin |
| 0 | 1 | 0 | 1 | 0 | ColdWire |
| 0 | 1 | 0 | 1 | 1 | DynamicWire |
Værdiinterval for procesbit
Værdiområde for funktionsstatus
| Bit 1 | Bit 0 | Beskrivelse |
| 0 | 0 | Inaktiv |
| 0 | 1 | Ledig |
| 1 | 0 | Færdig |
| 1 | 1 | Fejl |
Værdiområdet for funktionsstatus

- reservedele.fronius.com
- At www.fronius.com/contact du finder kontaktoplysninger på alle Fronius datterselskaber og salgs- og servicepartnere. Ofte stillede spørgsmål
Hvordan fejlfinder jeg LED-statusindikationer?
Hvis LED MS lyser rødt, indikerer det en hovedfejl. Hvis det blinker rødt, betyder det en fejl, der kan rettes. For LED NS kan et rødt lys indikere en dobbelt IP-adresse eller en alvorlig netværksfejl.
Hvad er standardkonfigurationsparametrene for busmodulet?
Standardkonfigurationsparametrene inkluderer leverandør-id: 0534hex, enhedstype: kommunikationsadapter, produktkode: 0320hex, produktnavn: Fronius FB Pro Ethernet/IP-2-port.
Dokumenter/ressourcer
 |
Fronius RI MOD Compact Com-modul [pdf] Brugsanvisning RI MOD Compact Com Module, RI MOD, Compact Com Module, Com Module, Module |



