1. Introduktion
Velkommen til instruktionsmanualen til din HAPPYMODEL Crux3 FPV-drone. Denne manual indeholder vigtige oplysninger til sikker og effektiv betjening, opsætning, vedligeholdelse og fejlfinding af din drone. Læs venligst denne manual grundigt, inden du bruger din Crux3-drone, for at sikre optimal ydeevne og levetid.
2. Produktet er slutview
Nøglefunktioner
- Ultralet 41 grams 1-2s børsteløs tandstikkerdrone.
- Udstyret med den nye CrazybeeX 4in1 AIO flycontroller.
- Har et CADDX ANT-kamera til tydelig FPV-feed.
- Drevet af nye 1202.5 6400KV børsteløse motorer.
- Bruger et XT30-stik til batteriindgang.
- Kompatibel med Insta360 Go Camera til filmoptagelsertage.
- Flere modtagermuligheder tilgængelige: Intern SPI Frsky (D8/D16), intern SPI Flysky (AFHDS/AFHDS-2A), intern SPI DSM2/X, ekstern Frsky RXSR og ekstern TBS Crossfire Nano.
Dimensioner og vægt
Crux3-dronen måler cirka 97 mm x 97 mm x 35 mm (uden propeller) og vejer 41 g (uden batteri), hvilket gør den yderst bærbar og adræt.

Figur 2.1: Forside view af HAPPYMODEL Crux3 FPV-dronen, vistasing dens kompakte design og propellayout.

Figur 2.2: Side view af Crux3-dronen, der fremhæver flycontrollerstakken og kameraplaceringen.
3. Komponenter inkluderet
Din HAPPYMODEL Crux3-pakke indeholder typisk følgende komponenter:
- HAPPYMODEL Crux3 FPV Drone (med valgt modtagerversion)
- Propeller (reservesæt medfølger normalt)
- Batteri (kan sælges separat eller medfølger afhængigt af pakken)
- Kamera (CADDX ANT forudinstalleret)
- Små tilbehør (f.eks. kabelbindere, skruetrækker, batterirem)

Figur 3.1: Crux3-dronen sammen med dens typiske tilbehør, pænt pakket i en bæretaske.
4. Opsætning
4.1 Batteritilslutning
Crux3-dronen bruger et XT30-stik til strømforsyning. Det anbefales at bruge 2s 350mAh / 400mAh / 450mAh / 520mAh LiPo-batterier for optimal flyveydelse. Sørg for, at batteriet er fuldt opladet, før du tilslutter.
- Juster forsigtigt XT30-stikket fra batteriet med XT30-stikket på dronen.
- Tryk godt til, indtil stikkene sidder helt fast.
- Fastgør batteriet til dronens ramme med den medfølgende batterirem for at forhindre bevægelse under flyvning.

Figur 4.1: Crux3-dronen med et batteri tilsluttet via XT30-stikket, klar til flyvning.
4.2 Propelinstallation
Crux3 bruger Gemfan 3018-2 propeller. Sørg for, at propellerne er installeret korrekt i henhold til motorens rotationsretning.
- Identificér den korrekte propel til hver motor (med uret og mod uret).
- Tryk forsigtigt propellen på motorakslen, indtil den sidder plant.
- Sørg for, at propellen er sikkert fastgjort, men overspænd den ikke, hvis du bruger skruer.

Figur 4.2: Et nærbillede view af EX1202.5 6400KV motor- og propelenheden på Crux3-dronen.
4.3 Binding med sender
Bindingsprocessen varierer afhængigt af modtagerversionen af din Crux3-drone. Se senderens manual for specifikke bindingsinstruktioner.
- Intern SPI Frsky-version: Kompatibel med ACCST D8/D16-tilstande. D8-tilstand anbefales.
- Intern SPI Flysky-version: Kompatibel med AFHDS- og AFHDS-2A Flysky-sendere.
- Intern SPI DSM2/X-version: Kompatibel med Spektrum-radio eller DSM2/X multiprotokol.
- Ekstern Frsky RXSR-version: ACCST D16 sbus-udgang.
- Ekstern TBS Crossfire Nano-version: Kræver TBS Crossfire-sender.
Typisk skal du sætte både dronens modtager og din sender i bindingstilstand. Se dokumentationen til flycontrollerens firmware (f.eks. Betaflight) for detaljerede procedurer for opsætning af modtager og binding.
5. Betjeningsvejledning
5.1 Flyveforberedelse
- Sørg for, at alle komponenter er sikkert fastgjort, og at propellerne er fri for skader.
- Kontroller, at batteriet er fuldt opladet og korrekt tilsluttet.
- Tænd dine FPV-briller, og sørg for et klart videofeed fra dronens CADDX ANT-kamera.
- Tænd din radiosender, og sørg for, at den er forbundet med dronen.
- Placer dronen på en flad, stabil overflade i et åbent område, fri for forhindringer.
5.2 Grundlæggende flyvekontrol
Gør dig bekendt med de grundlæggende betjeningselementer på din sender:
- Gashåndtag: Styrer højden (normalt venstre pind, lodret).
- Yaw: Roterer dronen til venstre eller højre (normalt venstre pind, vandret).
- Pitch: Vipper dronen fremad eller bagud (normalt højre pind, lodret).
- Rulle: Vipper dronen til venstre eller højre (normalt højre pind, vandret).
Aktiver motorerne ved hjælp af den dertil beregnede aktiveringskontakt på din sender (se din Betaflight-konfiguration). Når de er aktiveret, skal du langsomt øge gashåndtaget for at lette.
5.3 Insta360 Go-kamerakompatibilitet
Crux3-dronen er designet til at være kompatibel med Insta360 Go-kameraet. Dette giver mulighed for at optage stabiliserede billeder i høj kvalitet.tage under dine flyvninger. Sørg for, at Insta360 Go er sikkert monteret på dronens udpegede monteringspunkt før flyvning.
6. Vedligeholdelse
6.1 Generelle vedligeholdelsestips
- Propelinspektion: Kontrollér regelmæssigt propeller for revner, bøjninger eller hak. Udskift beskadigede propeller med det samme, da de kan forårsage vibrationer og påvirke flyveevnen.
- Rammeinspektion: Efter enhver hård landing eller styrt skal kulfiberstellet inspiceres for revner eller skader.
- Rengøring af motor: Hold motorerne fri for snavs, støv og affald. Brug trykluft til at rengøre dem om nødvendigt.
- Komponentkontrol: Sørg for, at alle skruer er stramme, og at de elektriske forbindelser (f.eks. XT30, motorledninger) er sikre.
- Batteripleje: Opbevar LiPo-batterier ved opbevaringsvolumentage (ca. 3.8 V pr. celle) når den ikke er i brug. Overoplades eller overaflades ikke.
7. Fejlfinding
7.1 Almindelige problemer og løsninger
- Drone aktiveres ikke: Kontroller, om aktiveringsknappen på din sender er korrekt konfigureret i Betaflight. Sørg for, at dronen er i vater, og at ingen præ-aktiveringsforhold (f.eks. lavt batteri, intet modtagersignal) forhindrer aktivering.
- Ingen videofeed: Kontroller, at CADDX ANT-kameraet er korrekt tilsluttet flycontrolleren. Kontroller dine FPV-briller for korrekt kanalvalg og batteriniveau.
- Ustabil flyvning/Vibrationer: Undersøg propeller for skader, og sørg for, at de er sikkert fastgjort. Kontroller for løse motorer eller stelkomponenter. Kalibrer accelerometeret i Betaflight igen, hvis det er nødvendigt.
- Tab af kontrol/problemer med rækkevidde: Sørg for, at din modtager er korrekt forbundet til din sender. Kontroller for antenneskader på både dronen og senderen. Undgå at flyve i områder med høj interferens.
- Motorer drejer ikke: Kontroller motorforbindelserne til ESC'en. Sørg for, at motorerne ikke er blokeret. Bekræft motoroutput i Betaflight-konfiguratoren.
For mere avanceret fejlfinding eller konfiguration henvises til den officielle Betaflight-dokumentation og community-fora for CrazybeeX flight controller.
8. Specifikationer
8.1 CADDX ANT 1200TVL kamera
| Feature | Specifikation |
|---|---|
| Billedsensor | 1/3" CMOS-sensor |
| Vandret opløsning | 1200 TVL |
| TV System | NTSC eller PAL |
| Billedformatforhold | 16:9 eller 4:3 |
| Synkronisering | Indre |
| Elektronisk lukker | PAL: 1 / 50-100,000; NTSC: 1 / 60-100,000 |
| S/N-forhold | > 52dB (AGC OFF) |
| Video output | CVBS |
| Linse | 1.8 mm |
| Min. Belysning | 0.001Lux@F1.2 |
| Auto Gain Control (AGC) | JA |
| BLC | JA |
| WDR | GlobalWDR |
| DNR | 3D DNR |
| Dimensioner | 14*14 mm (med beslag til 19*19 mm) |
| Bred strømindgang | DC 3.7-18V |
| Arbejdstemperatur | -20℃~+60℃ |
| Vægt | 2g (NV) |

Figur 8.1: Detaljerede specifikationer for det integrerede CADDX ANT 1200TVL FPV-kamera.
8.2 Modtagerspecifikationer
| Modtager type | Detaljer |
|---|---|
| Indbygget DSM2/X SPI-modtagerversion | Failsafe-understøttelse, SPI BUS-modtager DSM2/DSMX-kompatibel, maks. 12 kanaler, ingen jordforstyrrelser (sender og modtager 1 m fra jorden), rækkevidde 200 m-300 m, RSSI-aktivering (vises på beskyttelsesbriller). |
| Ekstern Frsky R-XSR modtagerversion | Vægt: 1.5 g, Antal kanaler: 16 kanaler (1-16 kanaler fra SBUS-kanal, 1-8 kanaler fra CPPM-kanal), Driftsvolumentage-område: 3.5V-10V, driftsstrøm: 70mA@5V, firmwareopgradering mulig, kompatibilitet: FrSky X-seriens moduler og radioer i D16-tilstand, kan understøtte Frsky New ACCESS Protocol (opgradering af firmware). |
| Ekstern TBS CRSF Nano-modtagerversion | Original TBS CROSSFIRE-modtager, CRSF-protokol, kompatibel med officiel TBS-sender. |

Figur 8.2: Specifikationer for forskellige modtagermuligheder, der er tilgængelige med Crux3-dronen.
8.3 Specifikationer for flycontroller, motor og propel
| Komponent | Specifikation |
|---|---|
| Flycontroller (CrazybeeX 4i1 AIO) | MCU: STM32F411CEU6 (100MHz, 512K FLASH), Sensor: MPU-6000 (SPI-forbindelse), Boardstørrelse: 28.5 * 28.5MM, Strømforsyning: 1-2S batteriindgang (DC 2.9V-8.7V), Indbygget 5A (hver) Blheli_S 4in1 ESC Dshot600 klar, Indbygget Betaflight OSD (SPI-kontrol), Indbygget 5.8G VTX, Indbygget SPI Frsky/Flysky-modtager eller ingen modtager, Indbygget 5V 1A BEC. Firmware-mål: CrazybeeF4FR (Frsky SPI RX), CrazybeeF4FS (Flysky SPI RX), CrazybeeF4DXS (DSM2/X SPI RX), CrazybeeF4DX (ekstern Frsky RXSR/TBS CRSF Nano). |
| Motor (EX1202.5 KV6400) | Konfiguration: 9N12P, Statordiameter: 12 mm, Statorlængde: 2.5 mm, Akseldiameter: Φ1.5 mm, Motordimension (diameter*længde): Φ14 mm*14.5 mm, Vægt (g): 4.4 g, Antal celler (Lipo): 1-2S. |
| Propeller (Gemfan 3018-2) | Centertykkelse: 5.5 mm, Propeldiameter: 76.5 mm, Centerhuldiameter: 1.5 mm. |
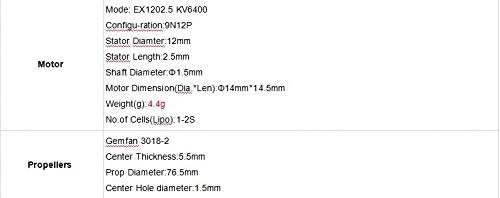
Figur 8.3: Detaljerede specifikationer for CrazybeeX-flycontrolleren, EX1202.5-motorer og Gemfan 3018-2-propeller.
9. Garanti og support
For garantioplysninger og teknisk support henvises til den officielle HAPPYMODEL-side. webwebstedet eller kontakt din forhandler. Gem din købsbevis til eventuelle garantikrav. Online ressourcer, herunder firmwareopdateringer og fællesskabsfora, kan også give værdifuld hjælp til avancerede brugere.





